트윈레버
전자레버 기본원리
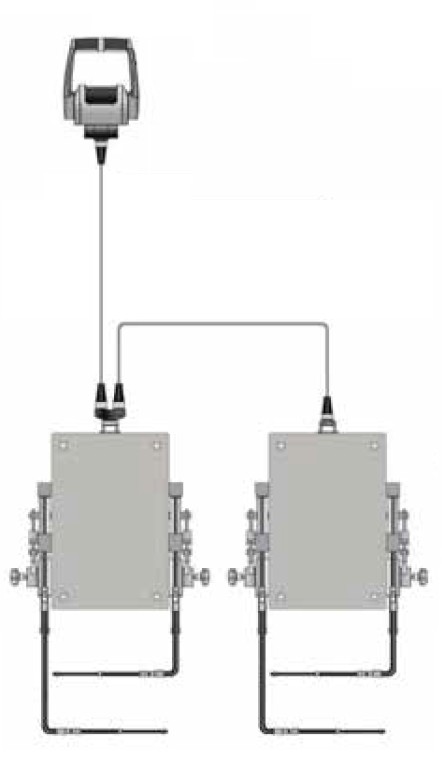
전자레버는 커멘드와 액추레이터로 구성이 되어있다.
커멘더는 조타실에서 엔진및 감속기를 조정하며,
액추레이터는 기관실에 위치하여 엔진의 가바나와 감속기의 변환밸브를 조정한다.
커멘더의 레버위치는 CANBus 방식의 디지탈 신호로 기관실의 액추레이터로 전달되고 이 신호값에 따라 엔진및 감속기를 조정한다.
주요 특징
– 액추레이터 방식에 따라 기계식, 전자식으로 구분된다.
– 커멘더의 작동이 기계식 보다 부드럽다.
– CANBus통신으로 커멘터 추가나 모니터링키트 장착을 쉽게 할 수 있다.
– 사용전원 : DC24V, 5A
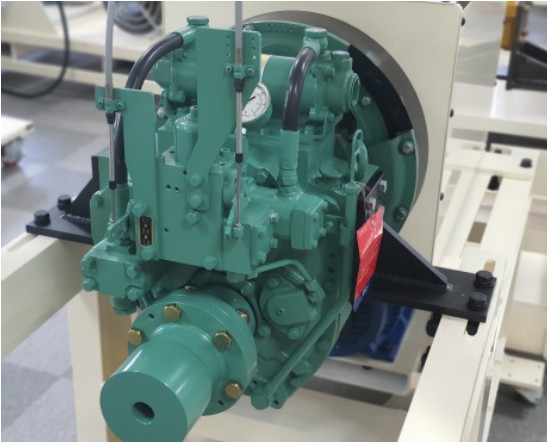
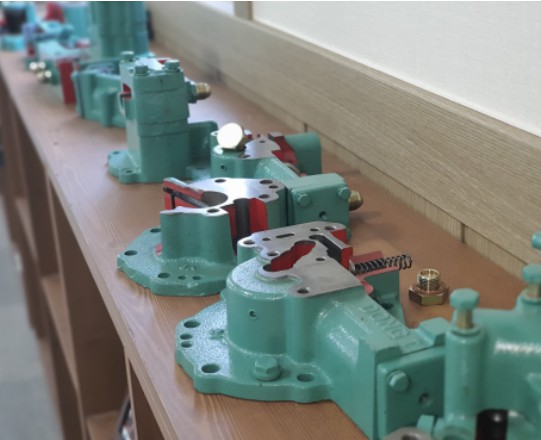
기계식 엑추레이터
– 기관조건 : 기계식엔진, 기계식 감속기
– 엔진 스로틀 스트로크 조정범위 : 5~80mm
– 감속기 전후진 스트로크 조정범위 : 5~40mm
– 기계식 엑추레이터 푸쉬풀하중(최대) : 45kg
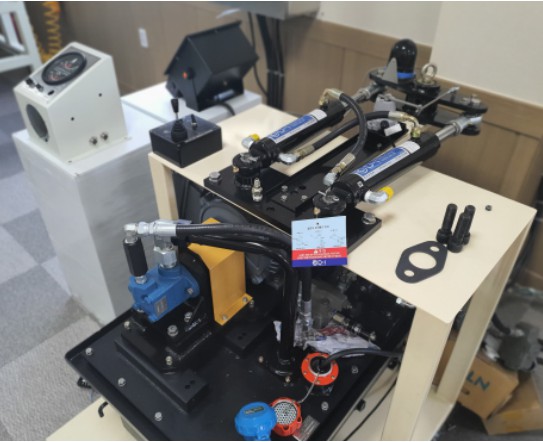
전자식 엑추레이터
– 기관조건 : 전자식엔진, 전기식 감속기
– 엔진가바나 제어방식 : 전압(0~5V), 전류(5~20mA)
– 감속기 제어방식(솔레노이드밸브) : DC24V 1.5A
어플리케이션
– 기관실과 조타실간의 거리가 먼 선박
– 레버조작이 빈번한 선박(작업선 등)
– 어선, 낚시선, 여객선, 차도선, 관선 등 광범위하게 적용
기계식엔진, 기계식감속기

전자식엔진, 전자식감속기